YL-38拉绳位移传感器概述 #
产品特点及应用 #
- 采用标准的 ModBus-RTU 通讯规约,支持组态王、Intouch、FIX、synall 等流行软件,能与 AB、西门子、施耐德、GE 等国际著名品牌的设备及系统之间实现数据通信;
- 结构紧凑、直线测量行程长度、安装空间尺寸小、安装维护方便;
- 金属外壳,防尘、防振动、坚固耐用;
- 刻槽排线,每圈行程一致,测量行程0-10米;
- 多股不锈钢拉绳,耐腐蚀性,经济实用,性价比高;
- 运行次数可达上500万次,线性精度±0.1%,重复性精度±0.01%;
典型应用:拉绳位移传感器特别适合直线导轨系统,液压气缸系统、试验机、伸缩系统(叉车、压机、升降机、弯管机、折弯机等),起重机或缆绳绞车,水库大坝保护系统,闸门开度控制系统、试验机压力机械、液压万能实验机械,仓储位置定位,压力机械,纺织机械,金属板材机械,包装机械,印刷机械、工业机器人、X-Y轴及其它长度位移等相关尺寸测量和位置控制,特别适合电液伺服液压万能试验机的控制。完全可以替代光栅尺,其它应用场合可以定制,完全可以实现低成本的高精度测量。
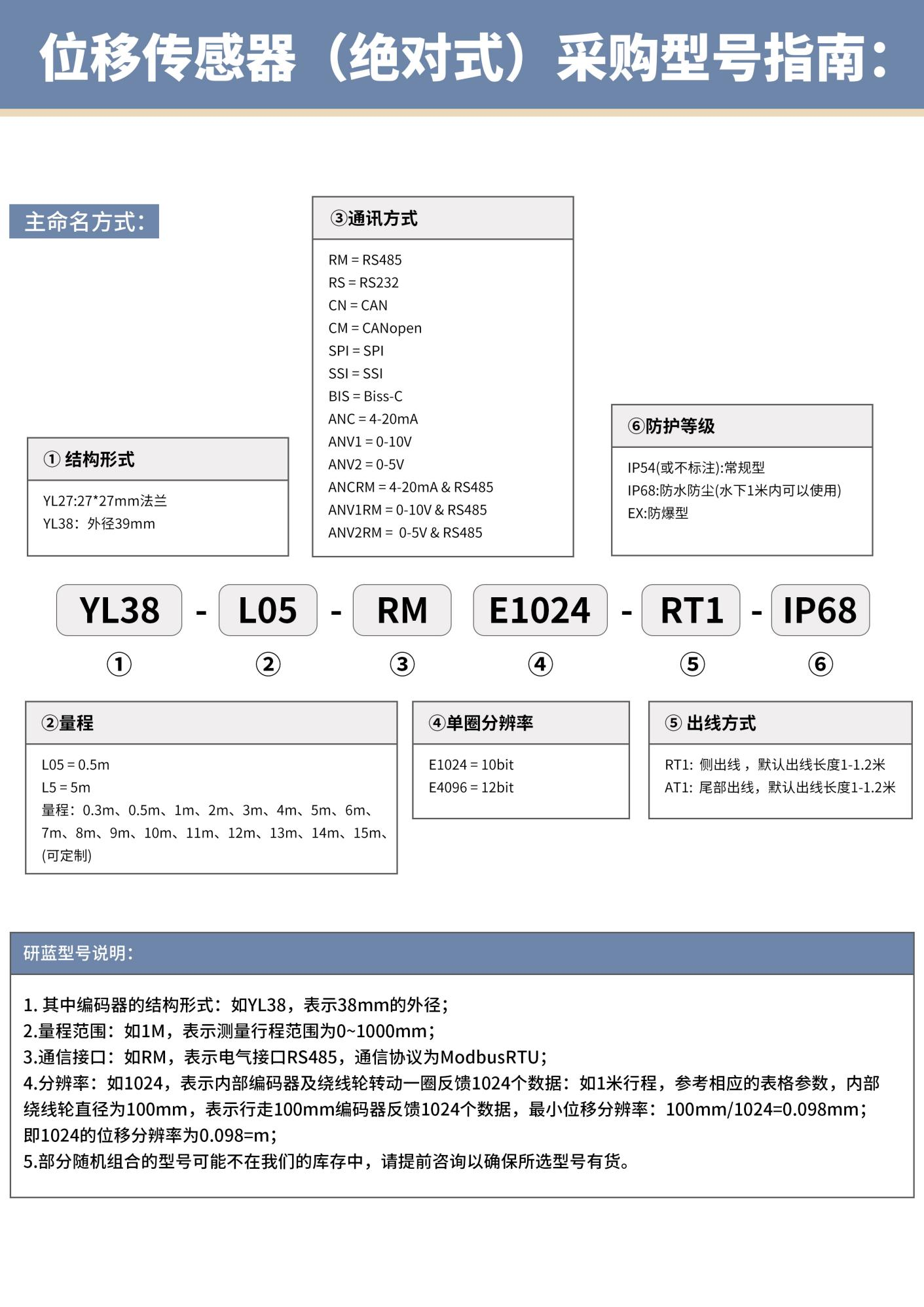
型号说明 #
 #
#
拉绳位移传感器产品参数 #
| 量程 | 输出信号 | 线性精度 | 绝对型: 分辨率1024 | 绝对型: 分辨率4096 | 轮周长mm |
| 500mm | RS485数字信号 | ±0.1% | 0.098mm | 0.0244mm | 100 |
| 1000mm | ±0.1% | 0.098mm | 0.0244mm | 100 | |
| 2000mm | ±0.1% | 0.146mm | 0.0366mm | 150 | |
| 3000mm | ±0.1% | 0.195mm | 0.0488mm | 200 | |
| 4000mm | ±0.1% | 0.244mm | 0.061mm | 250 | |
| 5000mm | ±0.1% | 0.244mm | 0.061mm | 250 | |
| 6000mm | ±0.1% | 0.220mm | 0.0549mm | 225 | |
| 7000mm | ±0.1% | 0.220mm | 0.0549mm | 225 | |
| 8000mm | ±0.1% | 0.332mm | 0.0830mm | 340 | |
| 9000mm | ±0.1% | 0.332mm | 0.0830mm | 340 | |
| 10000mm | ±0.1% | 0.332mm | 0.0830mm | 340 | |
| 使用寿命 | 500万次 | 工作温度 | -40~+85°C | ||
| 出线口拉力 | 2~3N | 拉线盒材质 | 铝合金,表面防静电干扰,拉头不锈钢 IP68编码器部份为不锈铁材质 | ||
| 最大工作速度 | 1m/s | 拉绳材质 | 多股钢丝线,外层尼龙涂层 | ||
| 防护等级 | IP54、IP68、防爆型 | 使用次数 | 大于500万次 | ||
| 电缆线长 | 1-1.2米 | 拉绳线径 | 0.8mm | ||
| 工作电压: | 5~24V | 波特率: | 9600~115200(默认9600) | ||
| 工作电流: | 100mA | 站号、地址: | 1-255(默认1) | ||
| 内核刷新周期: | 50uS | 电气寿命: | > 100000 h | ||
| 分辨率: | 1024(10 bit) 、4096(12 bit) | 通信协议: | 见11页 | ||
备注:传感器长度计算方法详见2.4.1
拉绳位移传感器接线说明 #
| 通信 | 红 | 黑 | 黄 | 绿 | 白 |
| RS485 | 电源正级(5~24V) | 0V地 | 置零(ZR) | RS485B | RS485A |
1.4.1 接线注意事项:
- 插头型号:IP54插头为5264,IP68及防爆款为航插;
- 接红线时需注意编码器标签上的电压值5~24V;
- 正常情况黄线悬空,若是有置零需求的时候,则接置零线;
- 务必避免置零线(黄线)接触红线,可导致短路,无法通讯 。
1.4.2 黄线(功能线)两个功能具体操作方法:
- 归零功能:置零线(黄线)接地 100mS以上时,编码器位置值归零;
- 恢复出厂功能:断电,黄线接黑线,上电保持两分钟,断电,取掉黄线重新上电。
产品配套(如有需要可联系业务人员) #
拉绳传感器支架

串口屏

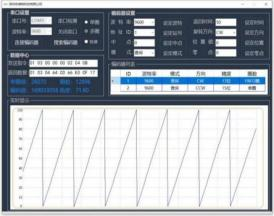
编码器上位机
串口软件

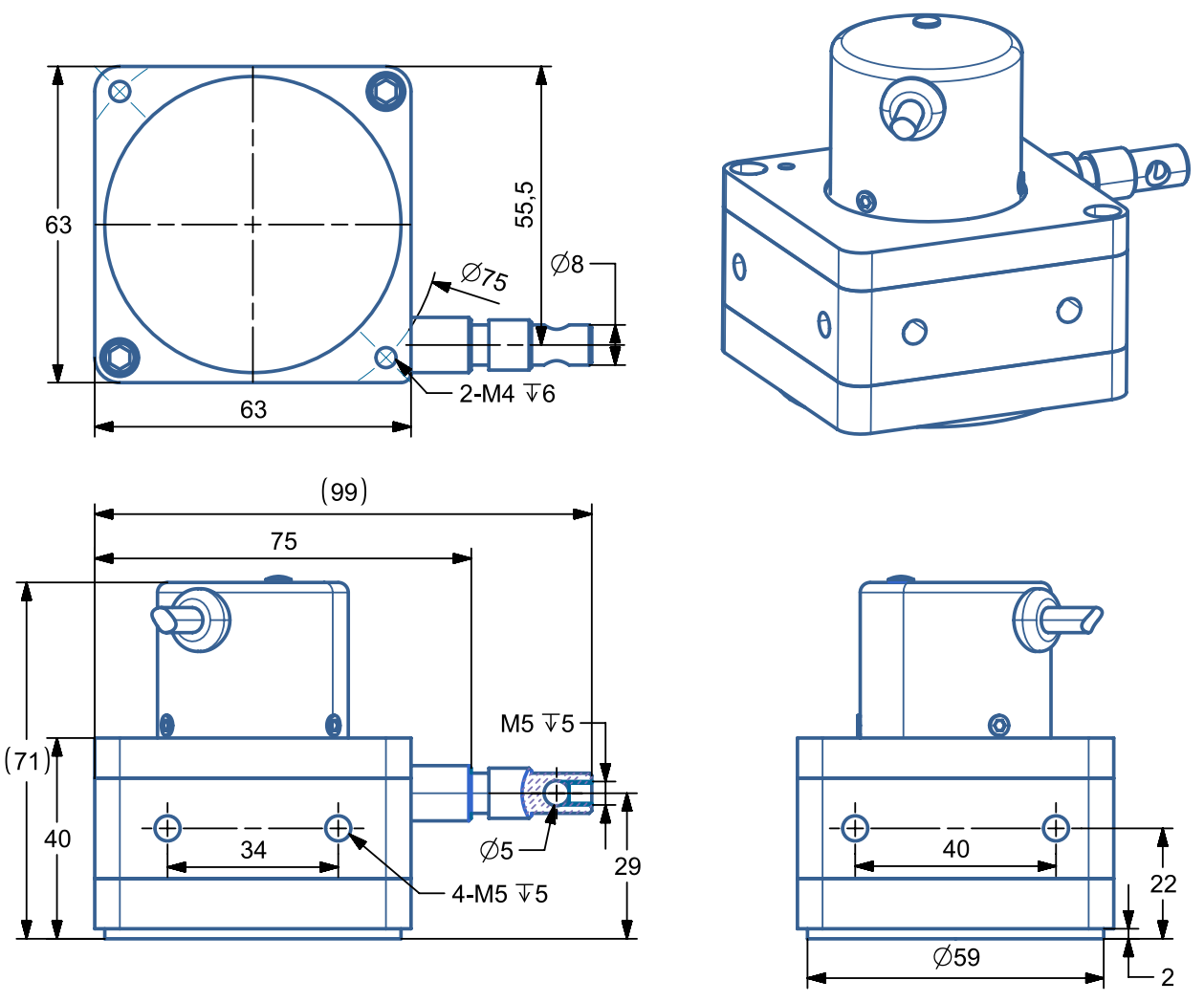
拉绳位移传感器尺寸图 #

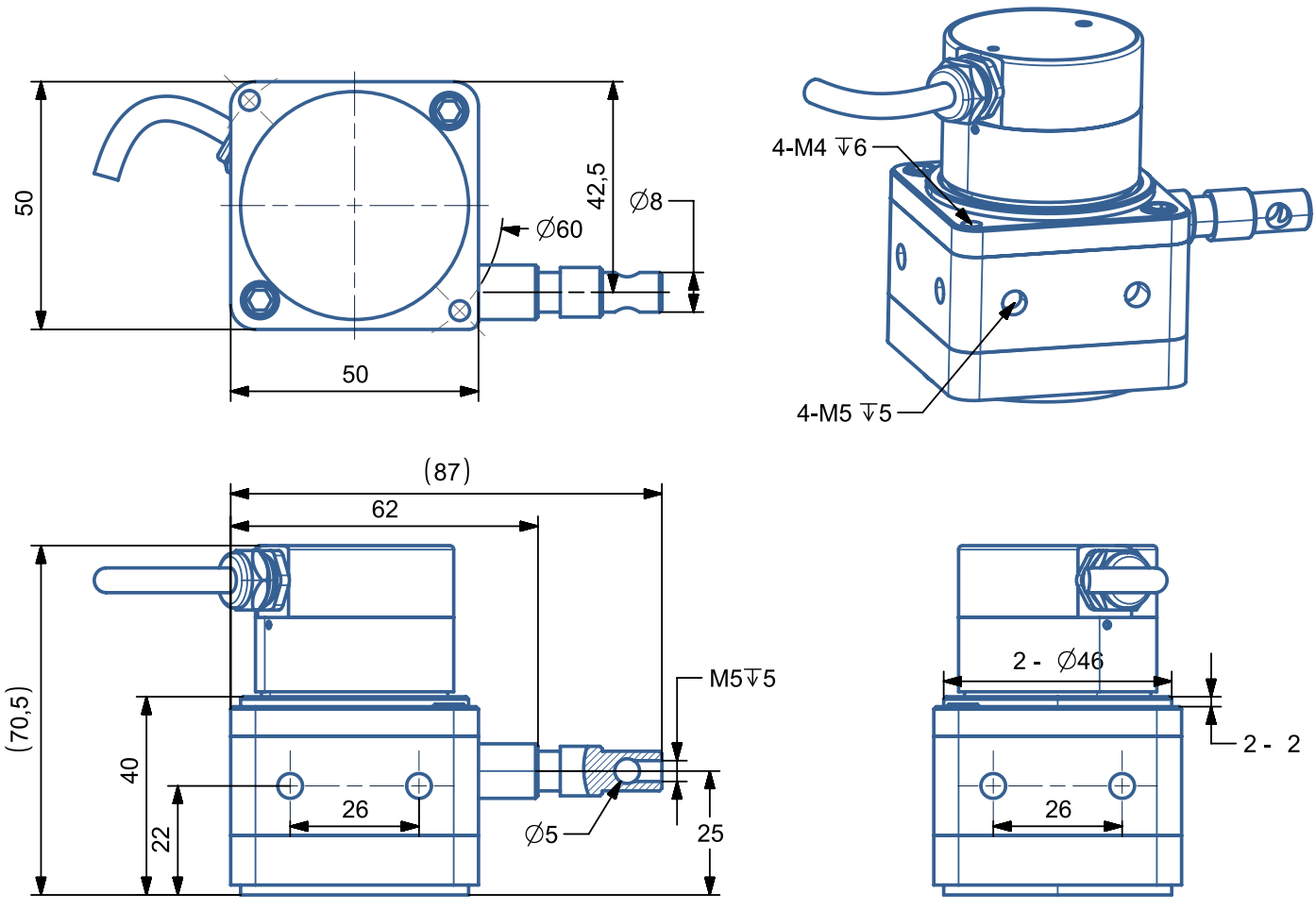
IP54 BRT38系列0.3米/0.5米/1米拉绳位移传感器安装尺寸图
IP54 BRT38系列2米拉绳位移传感器安装尺寸图
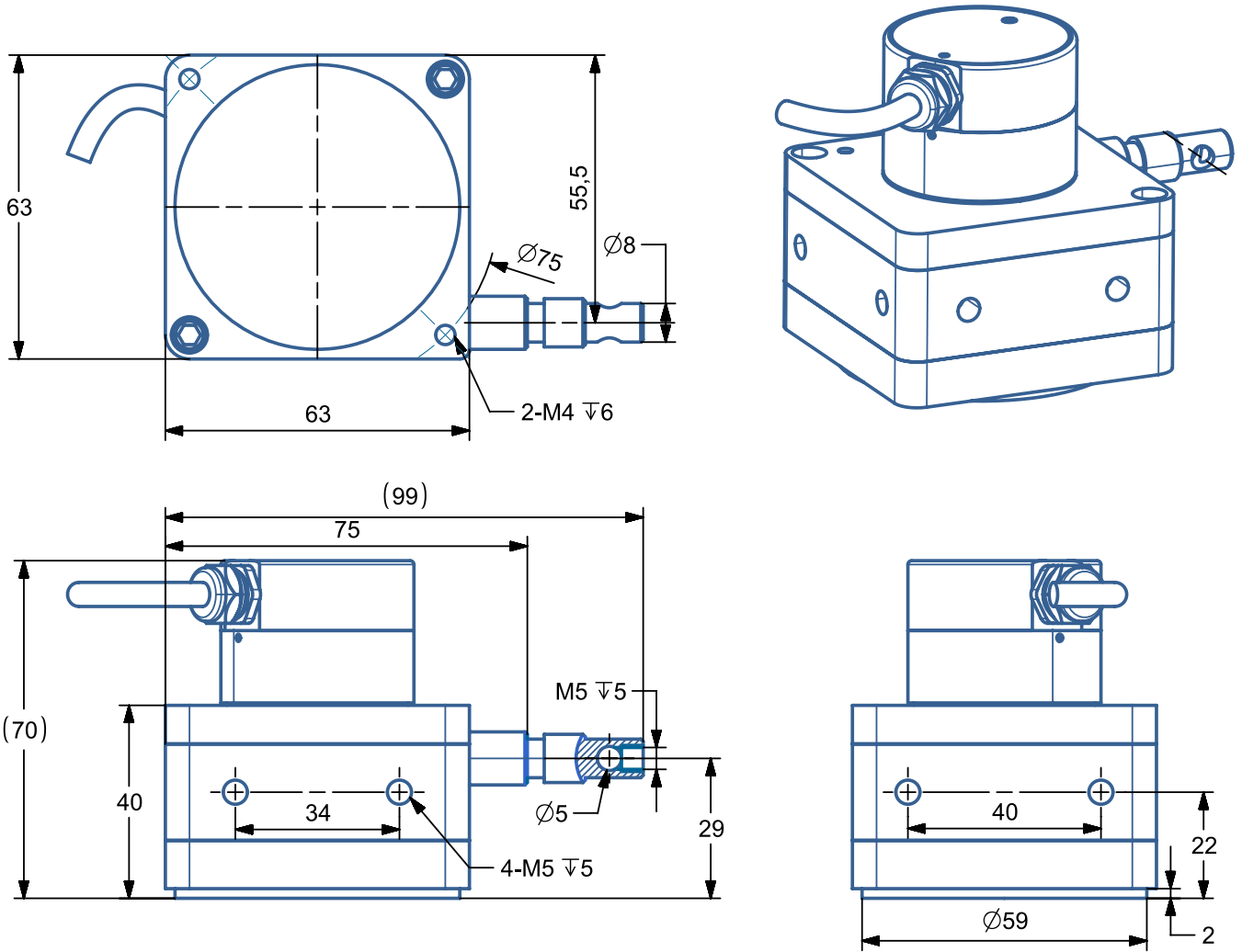
IP54 BRT38系列3米拉绳位移传感器安装尺寸图
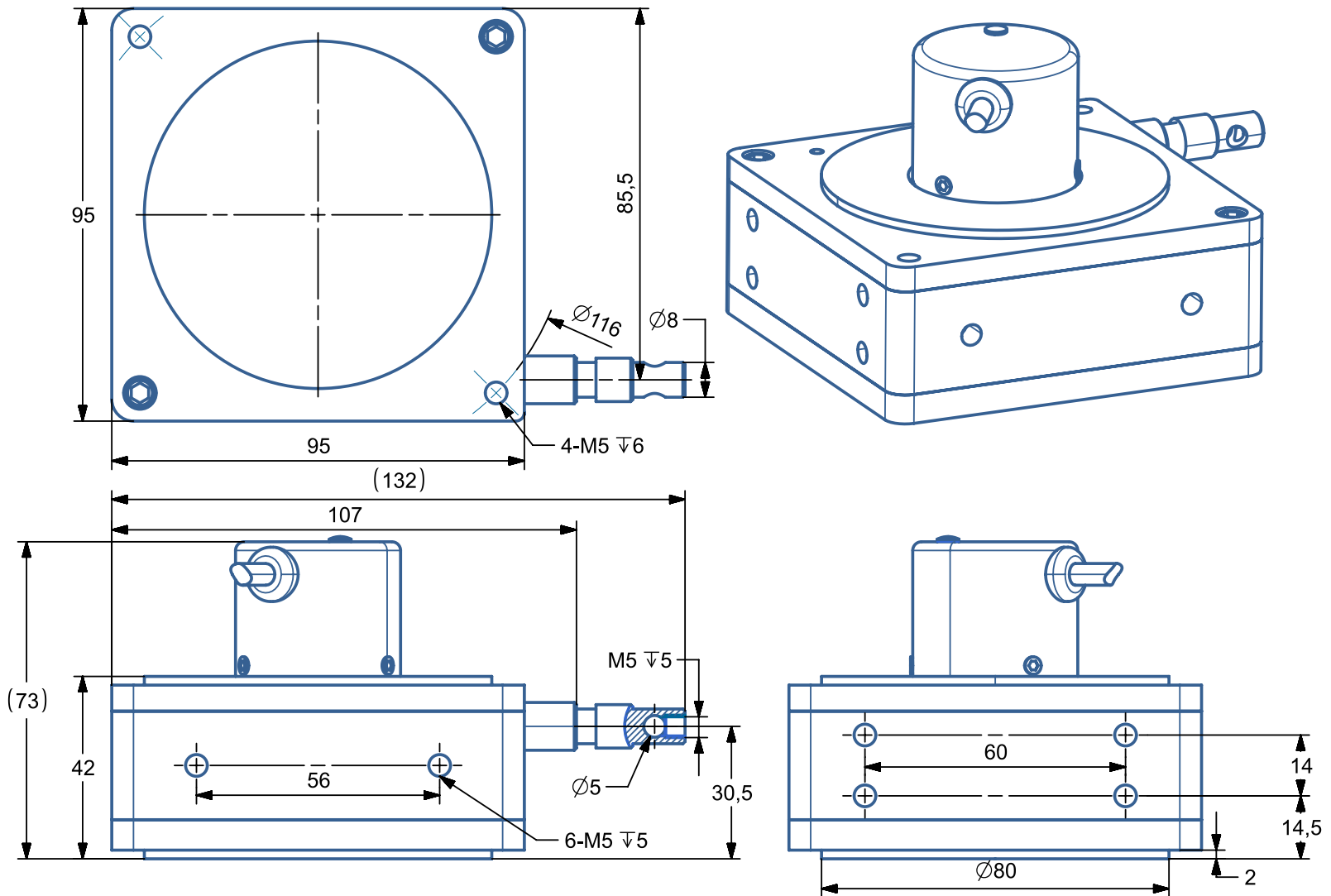
IP54 BRT38系列4米/5米拉绳位移传感器安装尺寸图

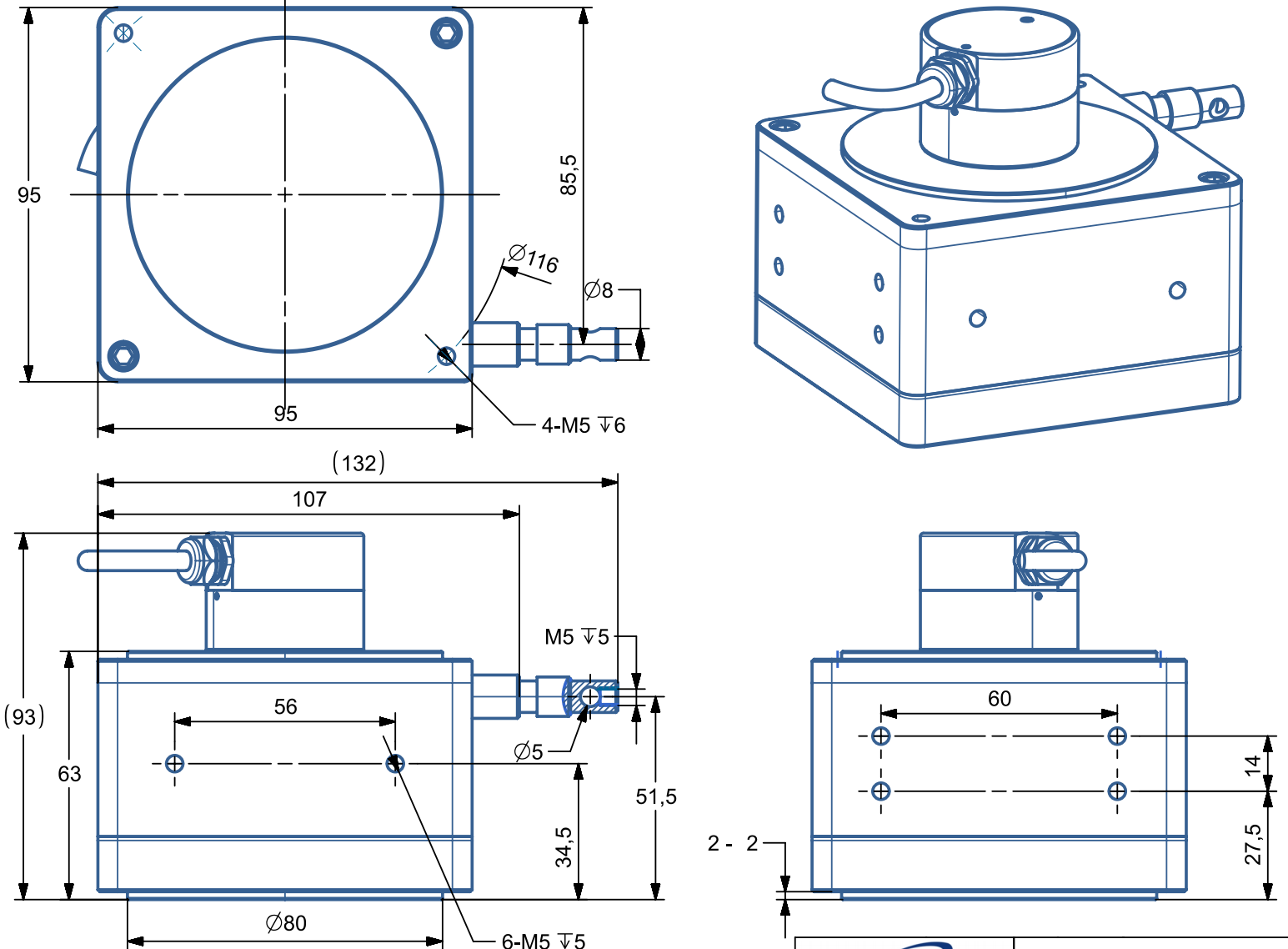
IP54 BRT38系列6米/7米拉绳位移传感器安装尺寸图

IP54 BRT38系列8/9/10米拉绳位移传感器安装尺寸图
 IP68/防爆款 BRT38系列0.3米/0.5米/1米拉绳位移传感器安装尺寸图
IP68/防爆款 BRT38系列0.3米/0.5米/1米拉绳位移传感器安装尺寸图
IP68/防爆款 BRT38系列2米拉绳位移传感器安装尺寸图
 IP68/防爆款 BRT38系列3米拉绳位移传感器安装尺寸图
IP68/防爆款 BRT38系列3米拉绳位移传感器安装尺寸图
 IP68/防爆款 BRT38系列4米/5米拉绳位移传感器安装尺寸图
IP68/防爆款 BRT38系列4米/5米拉绳位移传感器安装尺寸图
IP68/防爆款 BRT38系列6米/7米拉绳位移传感器安装尺寸图
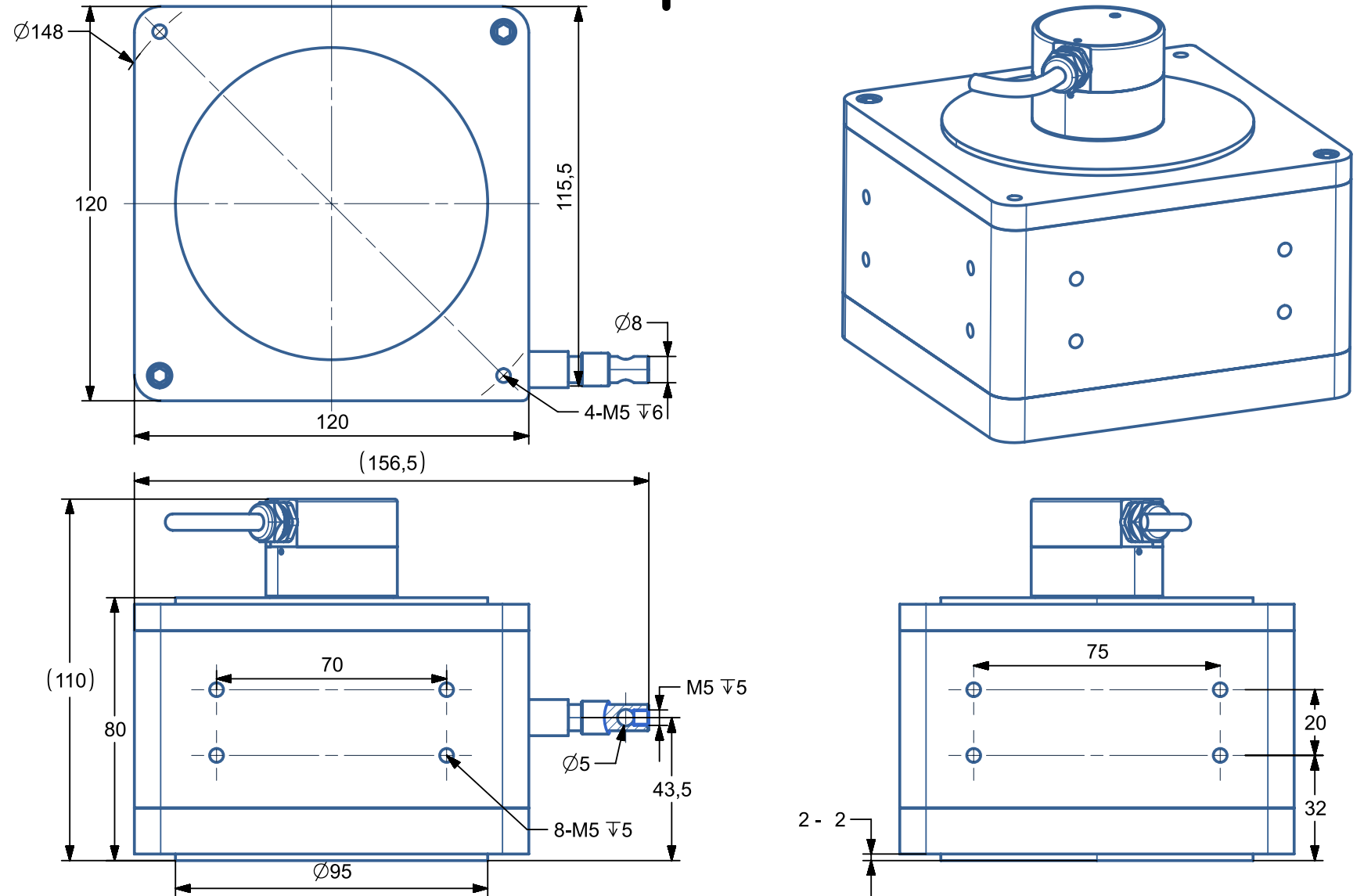
IP68/防爆款 BRT38系列8/9/10米拉绳位移传感器安装尺寸图
编码器RS485协议(标准MODBUS-RTU) #
通信协议详述:
本编码器使用MODBUS-RTU(国标GB/T19582-2008)通讯协议进行通讯,支持一主站控制多个从站,通过自带的上位机可以配置 255个从站地址,主站可以是单片机、PLC或PC机等。
2.1.通信参数
出厂时的串口默认配置,波特率默认为 9600bps,数据位 8,无校验,停止位 1;波特率可配置范围 9600~115200bps,编码器默认通信地址(站号)为1。
2.2. MODBUS-RTU帧格式
本编码器支持 MODBUS的0x03(读保持寄存器)、0x06(写单个寄存器)、0x10(写多个寄存器)。
2.2.1. 0x03读保持寄存器
主站发送:
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 内容 | ADR | 0x03 | 起始寄存器高字节 | 起始寄存器低字节 | 寄存器数高字节 | 寄存器数低字节 | CRC 高字节 | CRC 低字节 |
| 第 1字节ADR: | 从站地址码(1~255) | |||||||
| 第 2字节0x03 : | 读寄存器值功能码 | |||||||
| 第 3、4字节: | 要读的寄存器开始地址 | |||||||
| 第 5、6字节: | 要读的寄存器数量 | |||||||
| 第 7、8字节: | 从字节1到6的CRC16校验和 | |||||||
从站回送:
| 字节 | 1 | 2 | 3 | 4、5 | 6、7 | M-1、M | M+1 | M+2 | |
| 内容 | ADR | 0x03 | 字节总数 | 寄存器数据1 | 寄存器数据2 | ….. | 寄存器数据M | CRC 高字节 | CRC 低字节 |
| 第 1字节ADR: | 从站地址码(2~255) | ||||||||
| 第 2字节0x03 : | 返回读功能码 | ||||||||
| 第 3字节: | 从4到M(包括4及M)的字节总数 | ||||||||
| 第 4 ~ M字节: | 寄存器数据 | ||||||||
| 第 M+1、 M+2字节: | 从字节1到M的 CRC16 校验和 | ||||||||
2.2.2. 0x06写单个寄存器
主站发送:
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 内容 | ADR | 0x06 | 寄存器高字节 | 寄存器低字节 | 寄存器数高字节 | 寄存器数低字节 | CRC 高字节 | CRC 低字节 |
当从站接收正确,从站回送:
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 内容 | ADR | 0x06 | 寄存器高字节 | 寄存器低字节 | 寄存器数高字节 | 寄存器数低字节 | CRC 高字节 | CRC 低字节 |
2.2.3. 0x10 写多个寄存器
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 内容 | ADR | 0x10 | 起始寄存器高字节 | 起始寄存器低字节 | 寄存器数量高字节 | 寄存器数量低字节 | 数据字节总数 |
| 字节 | 8、9 | 10、11 | N、N+1 | N+2 | N+3 | ||
| 内容 | 寄存器 数据 1 | 寄存器 数据 2 | 寄存器 数据 M | CRC 高字节 | CRC 低字节 |
当从站接收正确时,从站回送:
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 内容 | ADR | 0x10 | 寄存器高字节 | 寄存器低字节 | 寄存器数高字节 | 寄存器数低字节 | CRC 高字节 | CRC 低字节 |
当从站接收错误时,从站回送:
| 字节 | 1 | 2 | 3 | 4 | 5 |
| 内容 | ADR | 0x83 | 异常码 | CRC高字节 | CRC低字节 |
2.3. 寄存器定义
2.3.1. 编码器寄存器
| 寄存器地址 | 描述 | 取值范围 | 支持功能码 | 备注 |
| 0x0000~0x0001 | 编码器值 | 0~0xFFFFFFFF (0~4294967295) | 0x03 | |
| 0x0002 | 编码器圈数值 | 0~0xFFFF (0~65535) | 0x03 | |
| 0x0003 | 编码器单圈值 | 0~0xFFFF (0~65535) | 0x03 | |
| 0x0004 | 编码器地址 | 1-255 | 0x06 | 通信地址 |
| 0x0005 | 波特率 | 0x0000~0x0004 | 0x06 | 0x00: 9600 0x01:19200 0x02:38400 0x03:57600 0x04:115200 |
| 0x0006 | 编码器模式 | 0x0000 0x0001 0x0005 | 0x06 | 0x00:查询模式 0x01:自动回传编码器值 0x05:自动回传编码器角速度值
|
| 0x0007 | 编码器自动回传时间 | 0~65535(毫秒) | 0x06 | 默认:50毫秒 注意:一旦设置自动回传时间小于20毫秒,编码器将再设置其他参数容易失败,谨慎使用!! |
| 0x0008 | 编码器重置 零点标志位 | 0x0001 | 0x06 | 写入0x0001,编码器以当前位置为零点 |
| 0x0009 | 编码器值 递增方向 | 0x0000~0x0001 | 0x06 | 0x00:顺时针 0x01:逆时针 |
| 0x000A | 编码器角速度 采样时间
| 0~65535(毫秒)
| 0x06
| 默认:100mS
|
| 0x000B~0x000C | 编码器设置 当前位置值 | 0~0xFFFFFFFF (0~4294967295) | 0x10 | 设置编码器当前位置值 |
| 0x000E | 编码器设置 中点标志位 | 0x0001 | 0x06 | 写入0x0001,编码器以当前位置为中点 |
| 0x000F | 编码器设置 5圈标志位 | 0x0001 | 0x06 | 写入0x0001,编码器以当前位置为5圈值 |
| 0x0020~0x0021 | 编码器角速度值 | -2147483648~ 2147483647 | 0x03 | 有符号整数 |
2.4. 编码器详细参数说明
2.4.1. 编码器值
| 寄存器地址 | 0x0000~0x0001 | 西门子PLC地址 | 40001~40002 |
| 数据范围 | 0~X(X为单圈分辨率*硬件圈数-1) | 单位 | – |
| 默认值 | – | 读/写 | 仅读(支持功能码0x03) |
| 生效方式 | – | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有的多圈编码器 |
编码器长度计算(仅供参考):
1,把拉绳传感器数值递增方向设置为拉出时数据增大
2.在拉绳未拉出时设置当前位置值为1000(基准,可另设其他值)
3.公式L=(X-1000)*轮周长/单圈分辨率 (单位 mm)
通信示例:
Tx:01 03 00 00 00 02 (C4 0B)
Rx:01 03 04 00 01 76 3B (CC 40)
注:括号内为 CRC 校验位,编码器值返回数据是 00 01 76 3B (十进制:95803)
2.4.2. 编码器圈数值
| 寄存器地址 | 0x0002 | 西门子PLC地址 | 40003 |
| 数据范围 | 0~Y(硬件圈数-1) | 单位 | – |
| 默认值 | – | 读/写 | 仅读(支持功能码0x03) |
| 生效方式 | – | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有多圈编码器 |
通信示例:
Tx:01 03 00 02 00 01 (25 CA)
Rx:01 03 02 00 08 (B9 82)
注:括号内为 CRC 校验位,编码器圈数值返回数据是 00 08 (十进制:8 圈)
2.4.3. 编码器单圈值
| 寄存器地址 | 0x0003 | 西门子PLC地址 | 40004 |
| 数据范围 | 0~N(N为单圈分辨率-1) | 单位 | – |
| 默认值 | – | 读/写 | 仅读(支持功能码0x03) |
| 生效方式 | – | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有多圈编码器 |
编码器当前单圈角度=编码器单圈值*360/单圈分辨率。例如读取编码器单圈值为634,单圈分辨率为1024(即10bit,2^10=1024),编码器当前角度=634*360/1024=222.89°
通信示例:
Tx:01 03 00 03 00 01 (74 0A)
Rx:01 03 02 02 7A (38 C7)
注:括号内为 CRC 校验位,编码器单圈值返回数据是 02 7A (十进制:634)
2.4.4. 编码器地址
| 寄存器地址 | 0x0004 | 西门子PLC地址 | 40005 |
| 数据范围 | 1~255 | 单位 | – |
| 默认值 | 1 | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:编码器地址/ID/站号
通信示例:
Tx:01 06 00 04 00 02 (49 CA)
Rx:01 06 00 04 00 02 (49 CA)
注:括号内为CRC校验位,设定地址是02 (HEX:0x0002)
2.4. 5. 波特率
| 寄存器地址 | 0x0005 | 西门子PLC地址 | 40006 |
| 数据范围 | 0~4 (0:9600bps 1:19200bps 2:38400bps 3:57600bps 4:115200bps ) | 单位 | – |
| 默认值 | 0(9600bps) | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
通信示例:
Tx:01 06 00 05 00 02 (18 0A)
Rx:01 06 00 05 00 02 (18 0A)
注:括号内为CRC校验位,设置的波特率为38400 bps(0x02)
2.4.6. 编码器模式
| 寄存器地址 | 0x0006 | 西门子PLC地址 | 40007 |
| 数据范围 | 0~5 (0x00:查询模式 0x01:自动回传编码器值 0x05:自动回传编码器角速度值) | 单位 | – |
| 默认值 | 0(查询模式) | 读/写 | 仅写(支持功能0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:编码器工作模式
通信示例:
Tx: 01 06 00 06 00 01 (A8 0B)
Rx: 01 06 00 06 00 01 (A8 0B)
注:括号内为CRC校验位,设置当前编码器数据模式为自动回传编码器值(默认查询)
2.4.7. 自动回传时间
| 寄存器地址 | 0x0007 | 西门子PLC地址 | 40008 |
| 数据范围 | 0~65535 | 单位 | mS(毫秒) |
| 默认值 | 50(mS) | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:编码器自动回传数据的时间周期(需配合编码器自动回传数据模式使用)
通信示例:
Tx: 01 06 00 07 00 64 (39 E0)
Rx: 01 06 00 07 00 64 (39 E0)
注:括号内为CRC校验位,设定自动回传时间为100毫秒(HEX:0x0064)
特别注意:一旦设置自动回传时间小于20毫秒,编码器再设置其他参数很容易失败,谨慎使用!!
2.4.8. 编码器重置零点标志位
| 寄存器地址 | 0x0008 | 西门子PLC地址 | 40009 |
| 数据范围 | 0~1 | 单位 | – |
| 默认值 | – | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | – |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:此地址写入1后,即设置编码器当前位置为零点,当前编码器值读取为0
通信示例:
Tx:01 06 00 08 00 01 (C9 C8)
Rx:01 06 00 08 00 01 (C9 C8)
注:括号内为CRC校验位,设置当前编码器值为0
2.4.9. 编码器值递增方向
| 寄存器地址 | 0x0009 | 西门子PLC地址 | 40010 |
| 数据范围 | 0~1 (0:CW顺时针递增 1:CCW逆时针递增) | 单位 | – |
| 默认值 | 1(CCW逆时针递增) | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:编码器值递增方向(编码器输出轴朝向观察者)
通信示例:
Tx:01 06 00 09 00 00 (59 C8)
Rx:01 06 00 09 00 00 (59 C8)
注:括号内为CRC校验位,设置当前编码器值顺时针数值增加
2.4.10. 编码器角速度采样时间
| 寄存器地址 | 0x000A | 西门子PLC地址 | 40011 |
| 数据范围 | 0~65535 | 单位 | mS(毫秒) |
| 默认值 | 100(mS) | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | 掉电记忆 |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
通信示例:
Tx: 01 06 00 0A 03 E8 (A9 76)
Rx: 01 06 00 0A 03 E8 (A9 76)
注:括号内为CRC校验位,设定自动回传时间为1000毫秒(HEX:0x3E8)
2.4.11. 设置编码器当前值
| 寄存器地址 | 0x000B~0x000C | 西门子PLC地址 | 40012~40013 |
| 数据范围 | 0~X(X为单圈分辨率*硬件圈数-1) | 单位 | – |
| 默认值 | – | 读/写 | 仅写(支持功能码0x10) |
| 生效方式 | 立即生效 | 记忆 | – |
| 数据类型 | 无符号整数 | 适用范围 | 所有多圈编码器 |
通信示例:
Tx:01 10 00 0B 00 02 04 00 00 30 39 (66 0E)
Rx:01 10 00 0B 00 02 (30 0A)
注:括号内为 CRC 校验位,设置的位置为 12345 (HEX:0x00003039)
2.4.12. 编码器设置中点标志位
| 寄存器地址 | 0x000E | 西门子PLC地址 | 40015 |
| 数据范围 | 0~1 | 单位 | – |
| 默认值 | – | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | – |
| 数据类型 | 无符号整数 | 适用范围 | 所有编码器 |
说明:设定当前编码器值为M(M为单圈分辨率*硬件圈数/2)
通信示例:
Tx:01 06 00 0E 00 01 (29 C9)
Rx:01 06 00 0E 00 01 (29 C9)
注:括号内为CRC校验位,设置编码器当前位置或角度为量程中点
2.4.13. 编码器设置5圈标志位
| 寄存器地址 | 0x000F | 西门子PLC地址 | 40016 |
| 数据范围 | 0~1 | 单位 | – |
| 默认值 | – | 读/写 | 仅写(支持功能码0x06) |
| 生效方式 | 立即生效 | 记忆 | – |
| 数据类型 | 无符号整数 | 适用范围 | 所有多圈编码器 |
说明:设定当前编码器值为Z(Z为单圈分辨率*5),例如编码器单圈分辨率为1024,设置之后,当前编码值为5*1024=5120。
通信示例:
Tx:01 06 00 0F 00 01 (78 09)
Rx:01 06 00 0F 00 01 (78 09)
注:括号内为 CRC 校验位,设置当前编码器值为 5 圈值
2.4.14. 编码器角速度值
| 寄存器地址 | 0x0020~0x0021 | 西门子PLC地址 | 40033~40034 |
| 数据范围 | -2147483648~2147483647 | 单位 | – |
| 默认值 | – | 读/写 | 仅读(支持功能码0x03) |
| 生效方式 | 立即生效 | 记忆 | – |
| 数据类型 | 有符号整数 | 适用范围 | 所有编码器 |
说明:线速度 = 编码器角速度值*轮周长 / 单圈分辨率 / 转速采样时间(单位:m/S)
例如:编码器角速度值回传为74565,轮周长为60mm(0.06m),单圈分辨率为 32768,转速采样时间为 100mS(0.1S)
编码器线速度 = 74565*0.06/32768/0.1 = 74565*0.000018310546875= 1.365325927734375m/S通信示例:
Tx:01 03 00 20 00 02 (C5 C1)
Rx:01 03 04 00 01 23 45 (73 30)
注:括号内为CRC校验位,编码器值返回数据是00 01 23 45 (十进制: 74565)
2.5. CRC校验函数代码参考
unsigned int Crc_Count(unsigned char pbuf[],unsigned char num)
{
int i,j; unsigned int wcrc=0xffff;
for(i=0;i<num;i++)
{
wcrc^=(unsigned int)(pbuf[i]);
for (j=0;j<8;j++)
{
if(wcrc&0x0001)
{
wcrc>>=1; wcrc^=0xa001;
}
else
wcrc>>=1;
}
}
return wcrc;
}
拉绳传感器指示灯说明 #
3.1. 默认由5个闪灯状态组成,默认状态:“蓝—>蓝—>蓝—>青—>蓝”间隔1s慢闪,表示编码器供电正常;
3.2. 其他工作状态指示
- 查询编码器数据状态:绿灯间隔5s快闪;
- 黄线设置零点状态:橙灯间隔5s快闪;
- 黄线上电复位状态:紫灯间隔5s快闪;
- 编码器数据自动返回状态:停1s慢闪,间隔5s快闪,闪烁5次,定义参照第一条。
- 红灯为编码器故障
3.3. 当编码的ID和波特率更改后,闪灯的颜色会相应变化,状态灯颜色参照表及代表的意义如下。
颜色及其数值定义关系:
| 颜色 | 蓝 | 青 | 橙 | 紫 | 绿 | 红 |
| 数值 | 0 | 1 | 2 | 3 | 4 | 5 |
(表1)
RS485/RS232/TTL/RS422波特率及其数值定义关系:
| 波特率 | 9600 | 19200 | 38400 | 57600 | 115200 |
| 数值 | 0 | 1 | 2 | 3 | 4 |
(表2)
- 上电正常工作状态:停4s,间隔1s慢闪烁5次,前4次闪灯颜色组合成一个四进制数据可以转换成对应编码器ID号,最后一次闪灯颜色定义为波特率;
- 例如:橙—>青—>紫—>橙—>蓝,查表1表2可得出对应数字为:21320,最后一位0, 根据上述表格0对应波特率为9600,前4位组成2132四进制数,转换成十进制ID:2*4^3+ 1*4^2 + 3*4^1 + 2*4^0 = 158(编码器ID)。
状态灯闪烁定义及示例:
| 第1段 编码器ID | 第2段 波特率 | ||||||
| LED状态 | OFF | ON | ON | ON | ON | ON | OFF |
| 保持时间 | 4s | 1s | 1s | 1s | 1s | 1s | 4s |
| 状态示例 | – | 橙 | 青 | 紫 | 橙 | 蓝 | – |
| 对应数字 | – | 2 | 1 | 3 | 2 | 0 | – |
| 状态解析 | – | 2*4^3+ 1*4^2 + 3*4^1 + 2*4^0 = 158 | 波特率为9600 | – | |||
| 状态含义 | – | 编码器ID | 波特率 | – | |||
拉绳位移传感器安装注意事项 #
- 拉绳位移传感器安装在固定位置,拉头拉出,严禁松手让拉线瞬间缩回;
- 运动需保持无障碍,安装时要使拉线垂直拉出 ;
- 非技术人员严禁拆卸,如有需要请在技术人员指导下进行拆卸重装;
- 不锈钢绳安装时,需要注意角度把控,如有需要可适当增加滑轮改变方向,以确保测量精度及钢索的使用寿命,避免让线摩擦出线口;
- 使用过程中应减少过量的粉尘杂质进入产品内,容易导致钢索涂塑层破坏或导致运转不顺等故障;
- 请确认在电源关闭的状态下接线,注意错误接线可能导致编码器主板烧坏。
我们的服务 #
- 本公司产品在正常使用(除客户不正当使用或因短接引起的电路永久损坏)情况下,质保期2年,免费提供远程技术指导服务,超出质保期限的产品寄回维修仅收取成本人工费用;
- 可开具专票(13%)、普票(1%),如需开票请联系业务人员;
- 图纸、上位机、通信协议等可在研蓝自动化科技官网下载:www.yanlanmc.cn,如需绝对值编码器教学视频可在我公司视频号观看。