YL27-拉绳移位传感器概述 #
产品特点及应用 #
- CAN接口具有实时双向通讯能力,CAN接口旋转编码器兼容CAN2.0电气规范。用户可通过命令设置编码器的ID地址、零点、数据发送模式等参数,是非常友好的智能拉绳位移传感器;
- 结构紧凑、直线测量行程长度、安装空间尺寸小、安装维护方便;
- 金属外壳,防尘、防振动、坚固耐用;
- 刻槽排线,每圈行程一致,测量行程0-0.65米;
- 多股软性不锈钢绳,耐腐蚀性,经济实用,性价比高;
- 运行次数可达上500万次,线性精度±0.1%,重复性精度±0.01%;
典型应用:拉绳位移传感器特别适合直线导轨系统,液压气缸系统、试验机、伸缩系统(叉车、压机、升降机、弯管机、折弯机等),起重机或缆绳绞车,水库大坝保护系统,闸门开度控制系统、试验机压力机械、液压万能实验机械,仓储位置定位,压力机械,纺织机械,金属板材机械,包装机械,印刷机械、工业机器人、X-Y轴及其它长度位移等相关尺寸测量和位置控制,特别适合电液伺服液压万能试验机的控制。完全可以替代光栅尺,其它应用场合可以定制,完全可以实现低成本的高精度测量。
型号说明 #
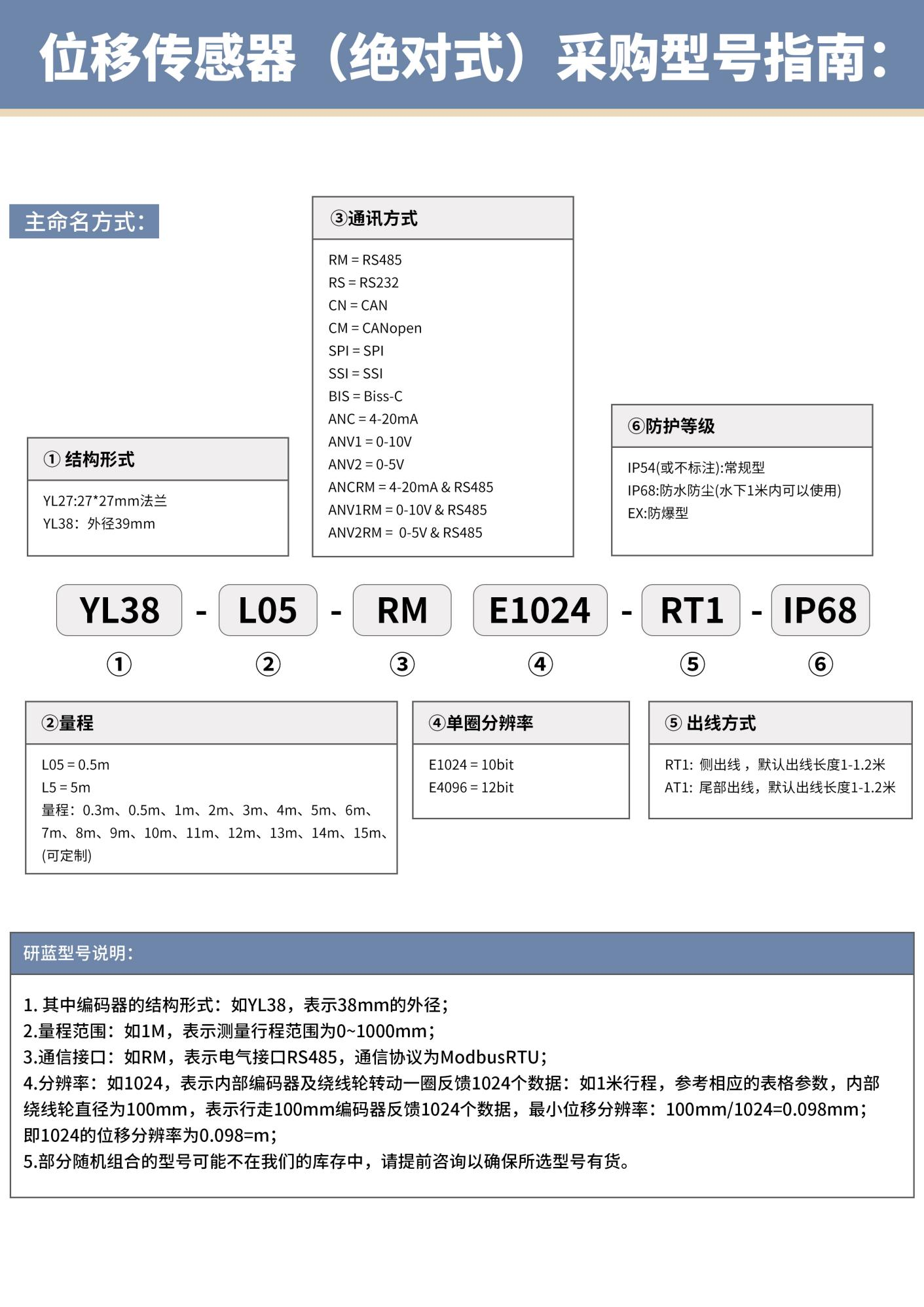 备注: (BRT27款量程为0-0.65米)
备注: (BRT27款量程为0-0.65米)
拉绳位移传感器产品参数 #
| 量程 | 输出信号 | 线性精度 | 绝对型: 分辨率1024 | 绝对型: 分辨率4096 | 轮周长mm |
| 0-650mm | CAN数字信号 | ±0.1% | 0.0586mm | 0.0146mm | 60 |
| 使用寿命 | 500万次 | 工作温度 | -40~+85°C | ||
| 出线口拉力 | 2~3N | 拉线盒材质 | 铝合金,表面防静电干扰,拉头不锈钢 IP68编码器部份为不锈铁材质 | ||
| 最大工作速度 | 1m/s | 拉绳材质 | 多股钢丝线,外层尼龙涂层 | ||
| 防护等级 | IP54、IP68、防爆型 | 使用次数 | 大于500万次 | ||
| 电缆线长 | 1-1.2米 | 拉绳线径 | 0.8mm | ||
| 工作电压: | 5~24V | 波特率: | 100K~1M(默认500K) | ||
| 工作电流: | 100mA | 站号、地址: | 1-255(默认1) | ||
| 内核刷新周期: | 50uS | 电气寿命: | > 100000 h | ||
| 分辨率: | 1024(10 bit) 、4096(12 bit) | 通信协议: | 见12页 | ||
(传感器长度计算方法详见2.5.3)
拉绳位移传感器接线说明 #
1.4.1 绝对值编码器接线注意事项:
- 插头型号:IP54插头为5264,IP68及防爆为航插;
- 接红线时需注意编码器标签上的电压值5~24V;
- 正常情况黄线悬空,若是有置零需求的时候,则接置零线;
- 务必避免置零线(黄线)接触红线,可导致短路,无法通讯 。
1.4.2 黄线(功能线)两个功能具体操作方法:
- 归零功能:置零线(黄线)接地 100mS以上时,编码器位置值归零;
恢复出厂功能:断电,黄线接黑线,上电保持两分钟,断电,取掉黄线重新上电。
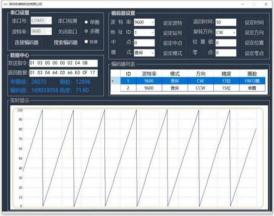
产品配套(如有需要可联系业务人员) #
拉绳传感器支架
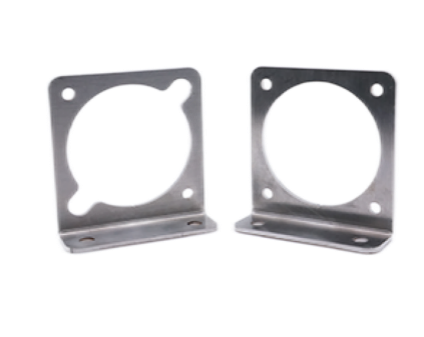
螺丝

编码器上位机
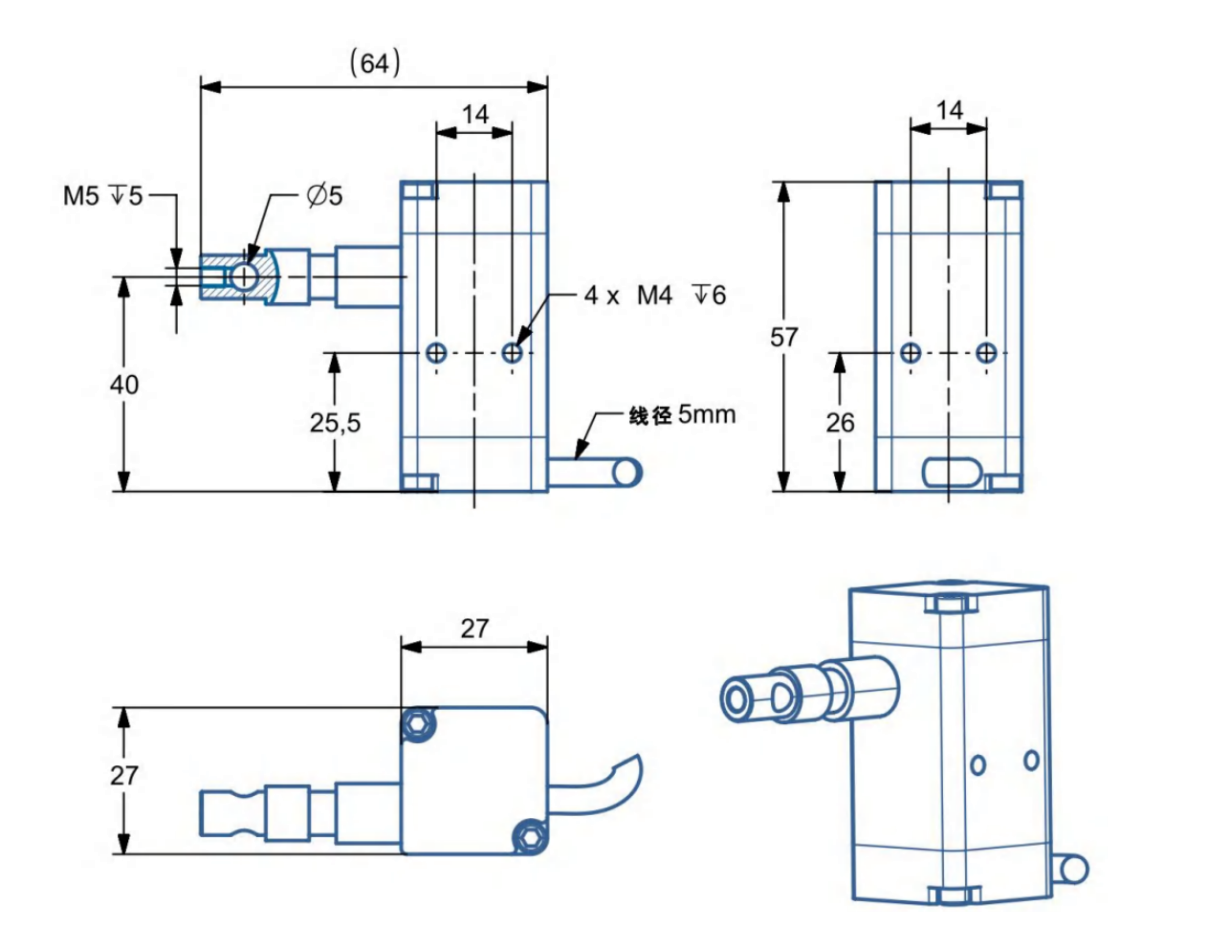
拉绳位移传感器尺寸图 #
#
 #
#
编码器CAN协议 #
2.1. CAN 简介
CAN 全称为Controller Area Network,即控制器局域网,由德国Bosch 公司最先提出,是国际上应用最广泛的现场总线之一。
2.2.CAN 技术规范
2.2.1.帧类型
在 CAN 总线中,有四种帧类型:数据帧、远程帧、错误帧和过载帧。
(1)数据帧:数据帧传输应用数据;
(2)远程帧:通过发送远程帧可以向网络请求数据,启动其他资源节点传送他们各自的数据,远程帧包含6 个位域:帧起始、仲裁域、控制域、CRC 域、应答域、帧结尾。仲裁域中的RTR位的隐极性表示为远程帧;
(3)错误帧:错误帧能够报告每个节点的出错。由两个不同的域组成,第一个域是不同站提供的错误标志的叠加,第二个域是错误界定符;
(4)过载帧:如果节点的接收尚未准备好就会传送过载帧,由两个不同的域组成,第一个域是过载标志,第二个域是过载界定符。
2.2.2.数据帧的结构
数据帧包括:【帧起始】+【仲裁域】+【控制域】+【数据域】+【CRC 域】+【应答域】+【帧结尾】
(1)帧起始:标志帧的开始,它由单个显性位构成,在总线空闲时发送,在总线上产生同步作用。
(2)仲裁域:由11 位标识符(ID10-ID0)和远程发送请求位(RTR)组成,RTR 位为显性表示该帧为数据帧,隐性表示该帧为远程帧;标识符按由高至低的次序发送,且前7 位 (ID10-ID4)不能全为显性位。标识符ID 用来描述数据的含义而不用于通信寻址,CAN 总线的帧是没有寻址功能的。标识符还用于决定报文的优先权,ID 值越低优先权越高,在竞争总线时,优先权高的报文优先发送,优先权低报文退出总线竞争。CAN 总线竞争的算法效率很高,是一种非破坏性竞争。
(3)控制域:为数据长度码 (DLC3-DLC0),表示数据域中数据的字节数,不得超过8。
(4)数据域:由被发送数据组成,数目与控制域中设定的字节数相等,第一个字节的最高位首先被发送。其长度在标准帧中不超过8 个字节。
(5)CRC 域:包括CRC(循环冗余码校验)序列(15 位)和CRC 界定符(1 个隐性位),用于帧校验。
(6)应答域:由应答间隙和应答界定符组成,共两位;发送站发送两个隐性位,接收站在应答间隙中发送显性位。应答界定符必须是隐性位。
(7)帧结束:由7 位隐性位组成。
2.2.3. 恢复出厂设置功能
断电后黄线接地(黑线),上电,保持2分钟后即可复位,复位后分离两条线
2.3. CAN 的应用层协议
编码器的 CAN 通讯协议采用一主多从的方式。
2.3.1. 关于标识符
CAN2.0B 规定标准的数据帧有11 位标识符,本协议将其定义为呼叫的目标地址。数据范围:0~255。
2.3.2. 关于数据域
主站和从站通过数据域传输数据。关于 8 个字节的数据域内容,本协议定义的格式:
【数据长度】 + 【编码器地址】+ 【指令 FUNC】+ 【数据DATA】
数据长度:1 字节,数据范围0~8,包括本身、编码器地址、指令FUNC、数据DATA 的字节总数。(注意:这个数据长度不同于帧信息的数据长度)
编码器地址:编码器的 CAN 节点地址,1 字节
指令 FUNC:通讯的功能码,1 字节
数据 DATA:指令所带的数据,0~4 字节
2.3.3. 关于标识符ID 和编码器地址(编码器出厂默认ID为1)
当主机呼叫编码器时,标识符表示的目标编码器的节点地址;
当编码器回应主机时,标识符表示的回传编码器的节点地址;
如主机和 1 号编码器通讯:
2.4. 应用CAN 和编码器通信:
2.4.1. 打开CAN 设备
(1) 设置波特率,主机要设为和编码器相同的波特率,编码器出厂默认速率是500kbps;
2.4.2. 帧信息设定
(1) 选择标准帧,而非扩展帧;
(2)选择数据帧,而非远程帧;
(3)计算数据域长度,包括数据域中的所有内容,最大值“8”。
2.4.3.数据传输
根据编码器的协议,填写数据域内容。数据域的内容为多字节时,低字节在前。
例如:A、主机向1号编码器发送指令:“读取编码器值”,数据域长度 4;
数据域:0x04(数据长度)+ 0x01(编码器地址)+ 0x01(指令码)+ 0x00(数据1)
| 标识符ID | Data[0] | Data[1] | Data[2] | Data[3] | Data[4] | Data[5] | Data[6] | Data[7] |
| 0X01 | 0x04 | 0x01 | 0x01 | 0x00 | —— | —— | —— | —— |
返回的数据:数据域长度 7;
数据域:0X07(数据长度)+ 0X01(编码器地址)+ 0X01(指令码)+ 0x00012345(数据)
| 标识符ID | Data[0] | Data[1] | Data[2] | Data[3] | Data[4] | Data[5] | Data[6] | Data[7] |
| 0X01 | 0x07 | 0x01 | 0x01 | 0x45 | 0x23 | 0x01 | 0x00 | —— |
2.5.布瑞特编码器CAN指令列表V2.1
2.5.1.CAN 协议
(1)采用CAN2.0B 标准帧通信协议。
(2)通信速率:1Mbps、500kbps、250kbps、125kbps、100kbps 可设置。500kbps 为默认通信速率设置。
注意:修改了编码器的通信速率后,主机也应修改为相同的通信速率!
2.5.2.指令结构
AN2.0B 指令码的构成:
[长度LEN] + [设备ID] + [指令FUNC] + [数据DATA]
- [长度LEN]:1 字节,包括[长度LEN]+[设备ID]+[指令FUNC]+[数据DATA];
- [设备ID]:1 字节,范围0~255;
- [指令]:1 字节,范围0~255;
- [数据]:0 ~4 字节;2 字节组成16 位数据,低字节在前;4 字节组成32位数据,低字节在前。
2.5.3. CAN指令列表V2.1
| 指令码 | 功能描述 | 示例(编码器地址ID默认01) 标准帧ID(标识符)亦为01 |
| 0x01 | 读取编码器值。 返回数据:32 位无符号整数。 数值范围:0~X(X为单圈分辨率*圈数-1)。 编码器长度计算(仅供参考): 1,把拉绳传感器数值递增方向设置为拉出时数据增大(需确认) 2.在拉绳未拉出时设置当前位置值为1000(基准,可另设其他值) 3.公式 L=(X一1000)*轮周长/单圈分辨率 (单位mm)
| 下发:[0x04][0x01][0x01][0x00] 返回:[0x07][0x01][0x01][0x45][0x23][0x01][0x00] 编码器值:0X00012345(十进制:74565) |
| 0x02 | 设置编码器ID , 数值范围:1~255(8 位无符号整数) 默认节点地址为 1(0x01) 下发数据:8 位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 设置参数立即生效 | 下发:[0x04][0x01][0x02][0x08] 返回:[0x04][0x08][0x02][0x00] 设定地址:0X08 设置成功后从机使用新地址应答 |
| 0x03 | 设置CAN 通讯波特率 数值范围:0~4(8 位无符号整数) 下发数据:8 位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 0x00:500K(默认);0x01:1M 0x02:250K;0x03:125K 0x04:100K; 设置参数立即生效 | 下发:[0x04][0x01][0x03][0x01] 返回:[0x04][0x01][0x03][0x00] 设定波特率:1M |
| 0x04 | 设置编码器模式: 0x00:查询, 0x02:自动返回编码器角速度值 0xAA:自动返回编码器值 设置参数立即生效
| 下发:[0x04][0x01][0x04][0xAA] 返回:[0x04][0x01][0x04][0x00] 设定模式:0xAA(自动回传) 设定自动模式后编码器位置或角速度会周期性主动回传。回传周期由编码器自动回传时间决定 |
| 0x05 | 设置编码器自动回传时间(掉电记忆,单位:微秒), 数值范围:50~65535(16位无符号整数) 设置参数立即生效
| 下发:[0x05][0x01][0x05][0xE8][0x03] 返回:[0x04][0x01][0x05][0x00] 设定自动回传时间:0X03E8(1000微秒) |
| 注意:设置太短的返回时间后,通过编码器上位机再设置其他参数很容易失败,谨慎使用! | ||
| 0x06 | 设置当前位置值为零点 下发数据:8位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 设置参数立即生效
| 下发:[0x04][0x01][0x06][0x00] 返回:[0x04][0x01][0x06][0x00] 设定位置值为零点,设置后当前编码器值为0 |
| 0x07 | 设置编码器值递增方向: 0x00:顺时针,0x01:逆时针 设置参数立即生效 | 下发:[0x04][0x01][0x07][0x01] 返回:[0x04][0x01][0x07][0x00] 设定方向:0x01(逆时针) |
| 0x0A
| 读取编码器角速度值。 返回数据:32 位有符号整数。 数值范围:-2147483648~2147483647 拉线位移传感器拉线线速度计算: 线速度 = 编码器角速度值*轮周长 / 单圈分辨率 / 转速采样时间(单位:m/S) 例如:编码器角速度值回传为74565,轮周长为60mm(0.06m),单圈分辨率为 32768,转速采样时间为 100mS(0.1S) 编码器线速度 = 74565*0.06/32768/0.1 = 74565*0.000018310546875= 1.365325927734375m/S | 下发:[0x04][0x01][0x0A][0x00] 返回: [0x07][0x01][0x0A][0x45][0x23][0x01][0x00] 角速度编码值:0X00012345(十进制:74565) |
| 0x0B
| 设置编码器角速度采样时间(掉电记忆,单位:毫秒) 数值范围:0~65535(16位无符号整数) 设置参数立即生效 | 下发:[0x05][0x01][0x0B][0x03][0xE8] 返回:[0x04][0x01][0x0B][0x00] 设置角速度采样时间:0X03E8(1000 毫秒) |
| 0x0C | 设置编码器中点 下发数据:8位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 设置参数立即生效
| 下发:[0x04][0x01][0x0C][0x01] 返回:[0x04][0x01][0x0C][0x00] 设定编码器以当前位置值为中点值。 设定当前编码器值为M(M为单圈分辨率*圈数/2)
|
| 0x0D | 设置编码器当前位置值 数值范围:0~X(X为单圈分辨率*圈数-1) 下发数据:32 位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 设置参数立即生效
| 下发:[0x07][0x01][0x0D][0x00][0x01][0x23][0x45] 返回:[0x04][0x01][0x0D][0x00] 设定编码器值:0X00012345(十进制:74565) |
| 0x0F | 编码器设置当前值为5圈值 下发数据:8位无符号整数。 返回数据:8 位无符号整数。 0:设置成功,other:错误码 设置参数立即生效
| 下发:[0x04][0x01][0x0F][0x01] 返回:[0x04][0x01][0x0F][0x00] 设定编码器以当前位置值为5圈值。即当前编码器值为Z(Z为单圈分辨率*5)
|
位移传感器安装注意事项 #
- 拉绳位移传感器安装在固定位置,拉头拉出,严禁松手让拉线瞬间缩回;
- 运动需保持无障碍,安装时要使拉线垂直拉出 ;
- 非技术人员严禁拆卸,如有需要请在技术人员指导下进行拆卸重装;
- 不锈钢绳安装时,需要注意角度把控,如有需要可适当增加滑轮改变方向,以确保测量精度及钢索的使用寿命,避免让线摩擦出线口;
- 使用过程中应尽量减少过量的粉尘杂质进入产品内,容易导致钢索涂塑层破坏或导致运转不顺等故障;
- 请确认在电源关闭的状态下接线,注意错误接线可能导致编码器主板烧坏。
我们的服务 #
- 本公司产品在正常使用(除客户不正当使用或因短接引起的电路永久损坏)情况下,质保期2年,免费提供远程技术指导服务,超出质保期限的产品寄回维修仅收取成本人工费用;
- 可开具专票(13%)、普票(1%),如需开票请联系业务人员;
- 图纸、上位机、通信协议等可在研蓝自动化科技官网下载:www.yanlanmc.cn,如需绝对值编码器教学视频可在我公司视频号观看。